
 So finden sie uns:
So finden sie uns:
Neue Beiträge
Nächste Veranstaltungen
BW-Kaserne Holzminden (Kinderkrebshilfe)
Login Form
Sponsoren

Servomodifizierer
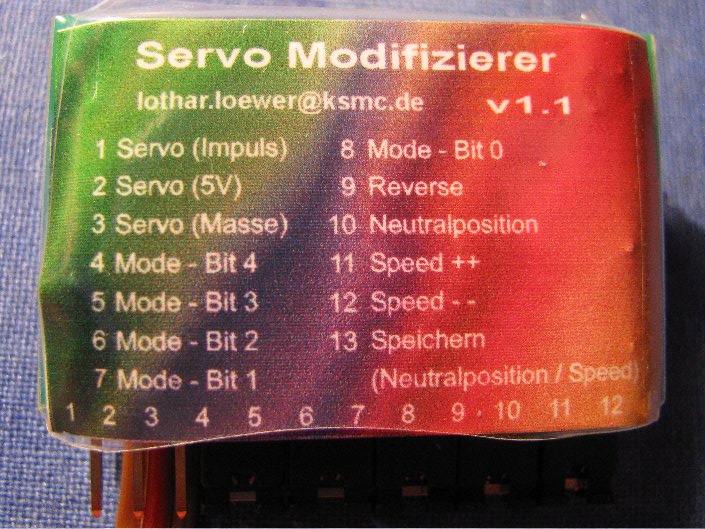
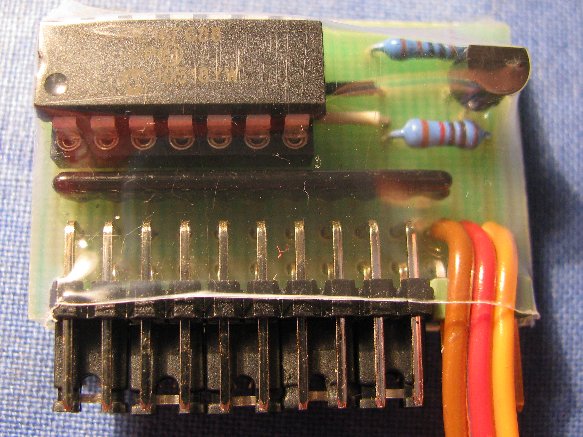
Version 1.1
Die Elektronik ermöglicht es den Drehwinkel eines Servos in 32 unterschiedlichen Stufungen zu variieren – von stark vermindert bis stark erweitert. Weiterhin kann die Servogeschwindig-keit und Servoreverse eingestellt werden.
Speziell ergeben sich für den Servo die folgenden Eigenschaften:
- Drehwinkelreduzierung bzw. Drehwinkelverdopplung (z. B. 90 Grad (Standard) auf 180 Grad; hier ist auf den mechanischen Anschlag der Servos zu achten um diese nicht zu beschädigen)
- Einstellung der Servogeschwindigkeit (bis zu ca. 50s für 90/180°)
- Servoreverse
- Definition der Neutralposition des Servos
Die Einstellungen sind gerade für Sonderfunktionen bei Schiffen z. B. Krandrehungen, Geschützdrehungen, Scheinwerferdrehungen usw. sehr interessant.
Die Programmierung der Elektronik erfolgt über Steckbrücken.
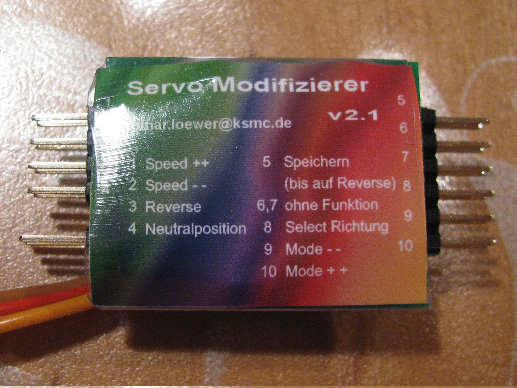
Version 2.1
Bei der Version 2.0 hatte sich lediglich das Layout geändert, so dass diese Version nicht weiter beschrieben wurde. In der Version 2.1 ist nun eine weitere Eigenschaft hinzugekommen: Es ist nun möglich die Drehgeschwindigkeit in Bezug auf die Drehrichtung zu programmieren, d.h. eine Rechtsdrehung kann mit einer anderen Geschwindigkeit ablaufen wie eine Linksdrehung.
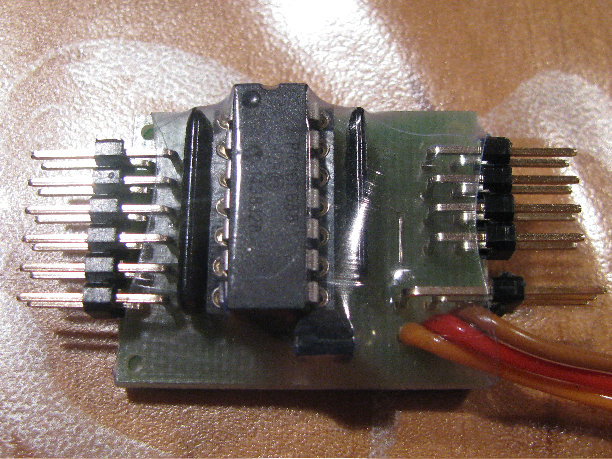
Um mit dem gleichen Layout (Anzahl der Programmiereingänge) auszukommen, wurde die Programierung des Drehwinkels auf nur zwei Stiftleisten, identisch der Geschwindigkeitsprogrammierung, verlagert. Diese Vorgehensweise hatte nun auch den Effekt, dass mehr Stufen möglich wurden, so dass nun 128 verschiedene Drehwinkel eingestellt werden können.
Hier dann mal die Bilder des aktuellen Layouts.
Version 3.0
Bisher hat der Servomodifizierer unmittelbar nach dem Einschalten zuerst die gespeicherte Impulslänge der Neutralposition an den Servo gesendet und ist erst dann auf die mit dem Senderpotentiometer aktuell eingestellte Position gefahren. Das habe ich in einer Version 2.2 geändert (der Servo fährt nun sofort auf die eingestellte Position). Diese Version gab es aber nur kurzfristig, da mich beim Layout schon länger die einzelstehende dreipolige Stiftleiste zum Anschluss des Servos gestört hat.
Diese letzte Änderung ist somit quasi direkt mit der Version 3.0 umgesetzt worden, bei der nun sowohl der Anschluss des Servos als auch die Verbindung zum Empfänger mit einer dreipoligen Stiftleiste umgesetzt sind. Das hat - zumindest für mich - den Vorteil, dass das zeitaufwändigere Auflöten des Servokabels entfällt und die Servomodifizierer wesentlich platzsparender gelagert werden können.
Hier dann die Bilder der Version 3.0.


Empfänger- und Servoanschluss (Eingangs- und Ausgangssignal der Elektronik) sowie Anschlussbelegung (Polung) der anzuschließenden Servokabel
